理工学部/機械工学科研究室紹介
![]()
![]()
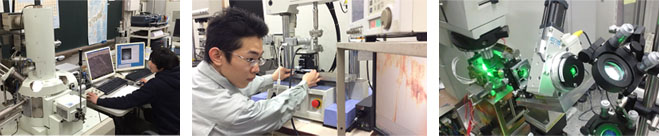
熱・流体
衝撃波に代表される気体力学関連現象の解明と工学的応用やエアコンなどの冷凍サイクルにおける効率改善を目的とした動力回収技術の開発に取り組んで、エネルギー・環境問題の解決をめざします。また、実験と数値計算により時間的・空間的に複雑に変化する流れ(乱流等)の構造解析を行ったり、分子運動といったミクロな視点から流れ現象を解明して、機械技術の進展に寄与します。

衝撃波管を伝播するマッハ2の垂直衝撃波の様子(左) 噴流拡散場の様子(中) 風車の模型による風洞実験(右)
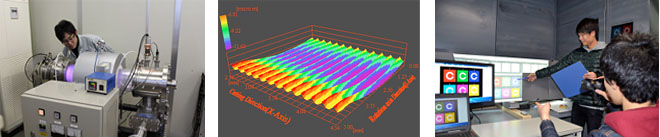
材料・強度
材料表面ナノ性状や結晶性質の変化に着目した実験・観察と計算の両面から研究が進められています。現象に対する理解を深めることにより、さまざまな機器に用いられる材料の信頼性と機能を高め、地球環境保護や安全・安心などに貢献することをめざしています。
EBSD(後方散乱電子回折)を利用した結晶方位解析(左)
電気油圧サーボ式疲労試験機によるき裂進展試験(中) 近接場ラマン分光装置による材料評価(右)
設計・生産
自動車産業をはじめ、エレクトロニクス産業、宇宙航空産業などに必要な機器や部品は、高度な「ものづくり」手法によって達成されています。これらに必要な機械を実際に作り出すための高度な生産加工技術やその手法の研究を行っています。
プラズマを用いた表面改質(左) 表面粗さ観察(中) ユニバーサルサイン設計システム開発(右)
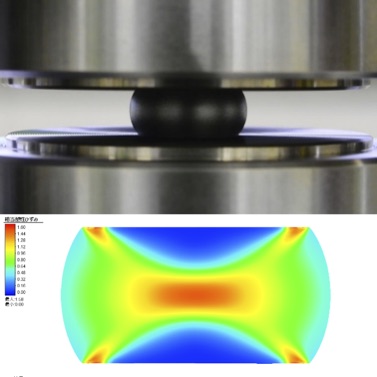
端面拘束圧縮試験と有限要素法解析
運動力学・制御
今後ますます活躍が期待されるロボットの知能化や運動学習制御についての研究を理論とハードウェア・ソフトウェアの両面から取り組んでいます。また、生体の情報処理メカニズムや人間の持つ機能的諸特性の解明に取り組んだり、機械および人間が"上手く"動作するための研究を行っています。
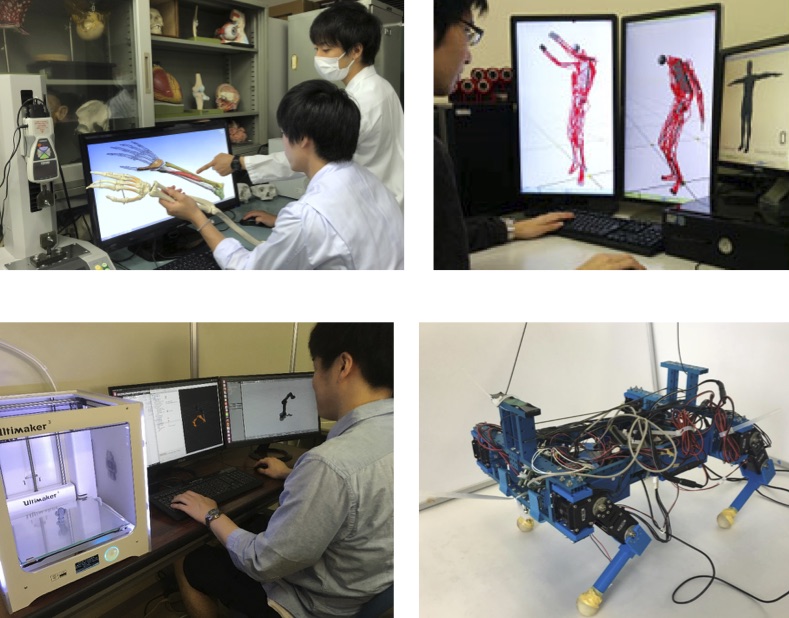
医工連携による骨折治療の力学シミュレーション(左上) 筋骨格シミュレーションによる最適動作設計(右上))
ロボットアームの知能化制御(左下) 機械学習による四脚ロボットの歩容生成(右下)