理工学部/メカトロニクス工学科研究室紹介
![]()
![]()
大原研究室

ロボットは、機構,アクチュエータ,センサ,制御回路,ソフトウェア,ネットワーク技術など様々な技術を統合したシステムです。こうした多くの要素が含まれるロボットシステムでは、ハードウェア/ソフトウェアの各要素をどのように組み合わせ、システムを構築していくかが重要なポイントとなってきます。本研究室では、こうした複雑なロボットシステムを俯瞰的にとらえながら、階層的、モジュール的にシステムを構築(デザイン)していきながら、汎用性の高いロボットシステムの構築方法の確立を目指しています。
図:音声認識を用いたロボット制御の様子
関山研究室
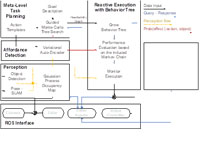
スマートグラスによるMR技術をベースに,地上ロボット,ドローンなど複数ロボットと人間を直感的結ぶCyber-Physical 身体性システムの開発を推進しています。環境の対象物に対し物体配置関係に基づいた人とロボットの認知共有システムを構築しています。ロボットは身体性に基づいたタスクの遂行可能性を自己評価し,必要に応じて複数ロボット間の協調形成を行うメカニズムを構築しています。また,Visual-SLAMによる屋内ドローンの飛行制御による撮影システムを構築し,人物群の構図バランスを最適化する撮影視点の自律的探索と制御を実現しています。
図:ロボットの身体性に基づく行動生成モデル
畑研究室
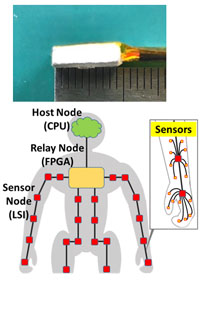
自動運転車の自己位置推定に向けた高精度MEMS慣性センサや、人と共存するロボットに向けた触覚センサの研究を行っています。より良いセンサ構造や信号処理手法の提案・実証に取り組んでいます。また、これらのセンサが通信量や精度を制御しながら,協調動作を行うセンサネットワークの研究も行っています。効果的にロボットの全身に感覚を与えることや、多種多様なMEMSセンサから人間の運動状態を詳細に検知するセンサシステムを目指しています。MEMS: Micro Electro Mechanical Systems
図上:材質判別用熱流式触覚センサ
図下:ロボット用センサネットワークのイメージ
楊研究室
ロボットに人間のような知能・行動能力を持たせたいというのは長年にわたる人類の夢です。
当研究室では、制御・情報処理技術により知能機械システムを設計、製作、ロボットシステムの要素技術、知能システムを実現するための基礎となる手法を学ぶだけでなく、よりよいシステムがないかを考えるなど研究を行っています。
図:楊研究室の研究風景
目黒研究室

自動車の自動運転やロボットの自律移動には,正確な自動車・ロボットの位置と周囲環境が保存された地図情報が重要となります。しかし,いつでもどこでも正しい位置を計測したり,手軽に自動運転で使えるような地図情報を構築したりする技術はまだありません。そこで研究室では,GNSS/GPSといった衛星を利用した測位技術を中心に,自動車や移動ロボットに適用する技術や,それらを利用したアプリケーションの研究開発を行っています。
図:位置推定技術開発用の実験車両
芦澤研究室

日本の社会の抱える問題に対し、メカトロニクス技術の貢献できる分野は数多く存在しています。例えば、エネルギー問題に対しては運動の適正化による画期的な効率向上の実現によって貢献することができます。少子高齢化に対しては人とメカトロニクス機器が協調し、少ない労働力で超高齢社会を支える生産システムの構築によって貢献できます。研究室ではこれらの概念の実現性を例証するメカトロニクスシステムを提案しています。
図:天井解体ロボット
佐伯研究室
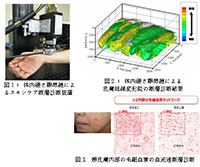
死因の六割を占める動脈硬化症や悪性腫瘍(がん)を始め,皮膚疾患,関節軟骨疾患などの多くの疾患では,マイクロメートル(1マイクロは百万分一メートル)のレベルで生体組織の硬さが変化します。当研究室では,光を使って生体表面下の内部組織の硬さ(機械特性)をマイクロメートルレベルで断層的に見る診断技術『体内硬さ顕微鏡(多機能OCT)』を開発しています。再生組織による治療診断などの最先端医療用途に加え,アンチエイジング機器などの産業応用にも展開しています。血管・内臓・再生組織の機械特性を断層診断する医療機器が実現すれば,動脈硬化や微小がんを早期発見し,再生治療を具現化できるため,多くの患者に貢献が期待できます。また,これらに医療技術を,燃料電池自動車の開発など工業材料検査技術として役立てるプロジェクトも推進しています。
市川研究室
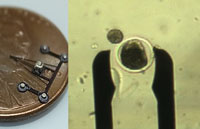
筋肉や腸が効率的に力出したり栄養補給することができるのは、マイクロサイズの細胞システムが効率良く作用するからです。このようなマイクロ領域特有の現象を有効に使い、バイオ,エネルギー,環境の諸問題を解決する研究を行っています。現在は細胞操作のためのマイクロロボットやマイクロエネルギー発電,センサの研究を行っています。
図:磁気駆動マイクロロボットによる牛卵子の除核
井上研究室
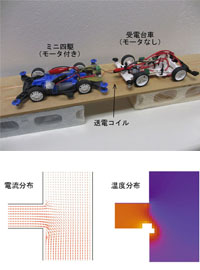
無線利用技術,電気電子材料・デバイス技術などの観点からメカトロニクス・システムの高度化を目指します。電気エネルギーの供給方法として本研究室で取り上げている無線電力伝送は,電源と機器の間を無線で繋ぐものであり,有線給電の場合のケーブル取り回し,コネクタでの接触不良の問題や,バッテリー給電の場合のバッテリー持続時間の問題などを解決する技術として期待されています。また,別のエネルギーの観点より,超低消費電力性や超高感度性などの特長を持つ超伝導デバイスに関する研究も行っています。学生の自由な発想による装置開発も積極的に進めます。
図上:牽引する受電台車が路面の送電コイルから無線送電を受けて走行するミニ四駆
図下:超伝導ナノデバイス(電流合流部分付近)のシミュレーション