トップページ/受賞 理工学研究科の土田将也さんが日本機械学会で若手優秀講演フェロー賞を受賞
| 受賞者 |
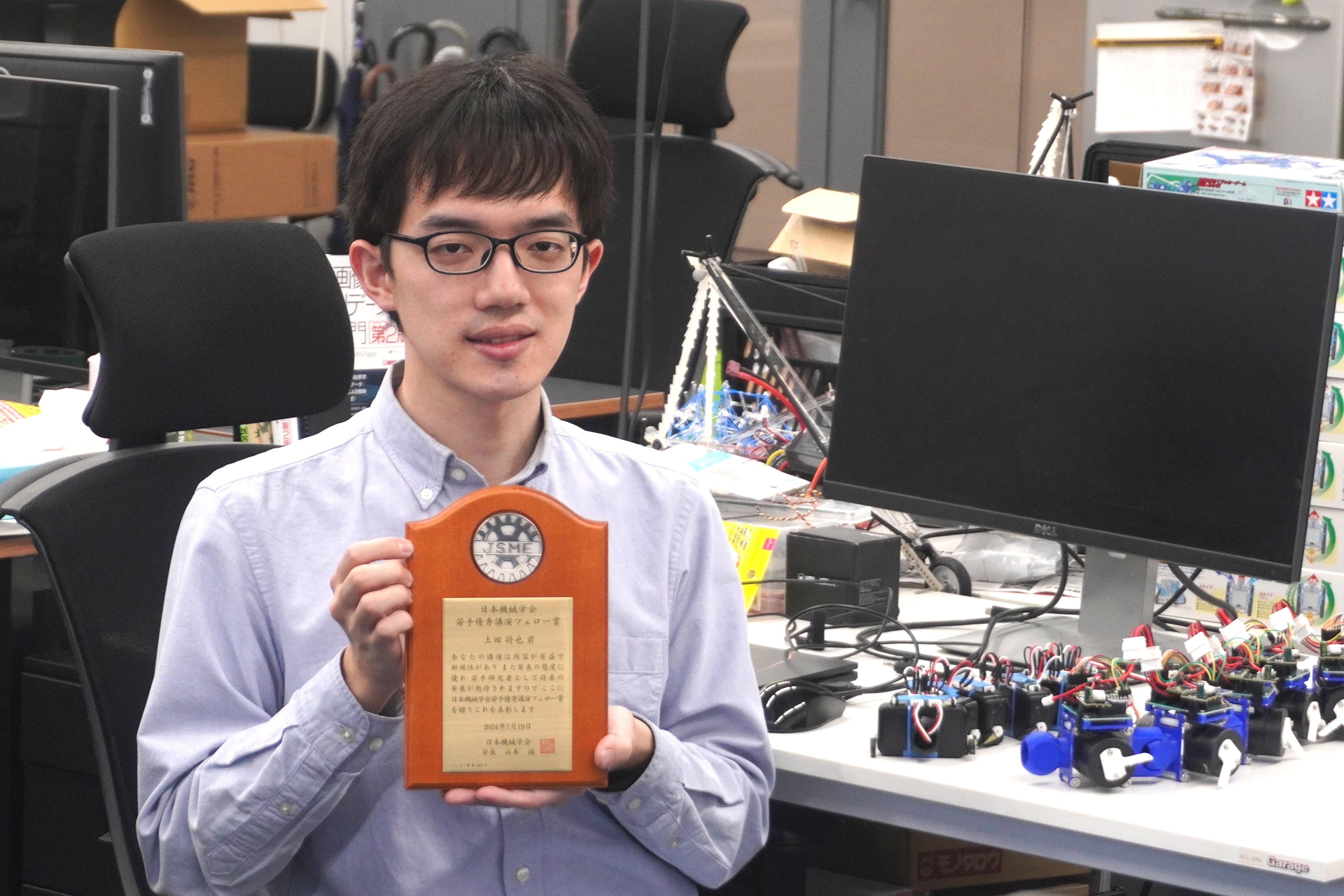
土田 将也さん(理工学研究科 機械工学専攻 修士課程2年,池本研究室) |
|---|---|
| 受賞名 |
日本機械学会 若手優秀講演フェロー賞 |
| 受賞日 |
2024年7月19日 |
| 受賞テーマ |
多脚ロボットにおける脚間の動作位相差の評価 |
|
本賞は2024年3月に開催された、日本機械学会東海支部・講演会講演会における優秀な研究・講演を行ったもののうち、フェロー賞審査が実施され、表彰対象者に対して「若手優秀講演フェロー賞」として顕彰するものです。 本研究では、受賞者の土田さんは、12個のブラシレスDCモータを使った12脚のムカデロボットを製作し、そして歩行制御実験を行いました。特に、ブラシレスDCモータ駆動力をダイレクトに脚の動きに伝達させ、床からの反力をそのモータの動きに反映させることを可能とする、バックドライ・バビリティによって、脚の柔らかい回転をすべての脚に実装しました。さらに、各モータに厳密なベクトル制御系を組むことでトルク制御を実装しました。それぞれの脚における角度、角速度、角加速度、及び回転負荷といった、モータの状態を、高速で並列に計測・記録することが可能で、さらに計測したデータをもとにオンラインでトルク制御が可能です。本発表では、ムカデ全体の身体の動きと各脚間の位相差を計測・変化を分析しました。現在、本研究成果をもとに、機械学習などを通じて故障から自律復帰するロボット設計工学を推進しています。 |
|