トップページ/受賞 理工学研究科(2025年度修了)の新美大樹さんと目黒淳一准教授がICRA 2026 ワークショップでBest Presentation AWARDを受賞
-
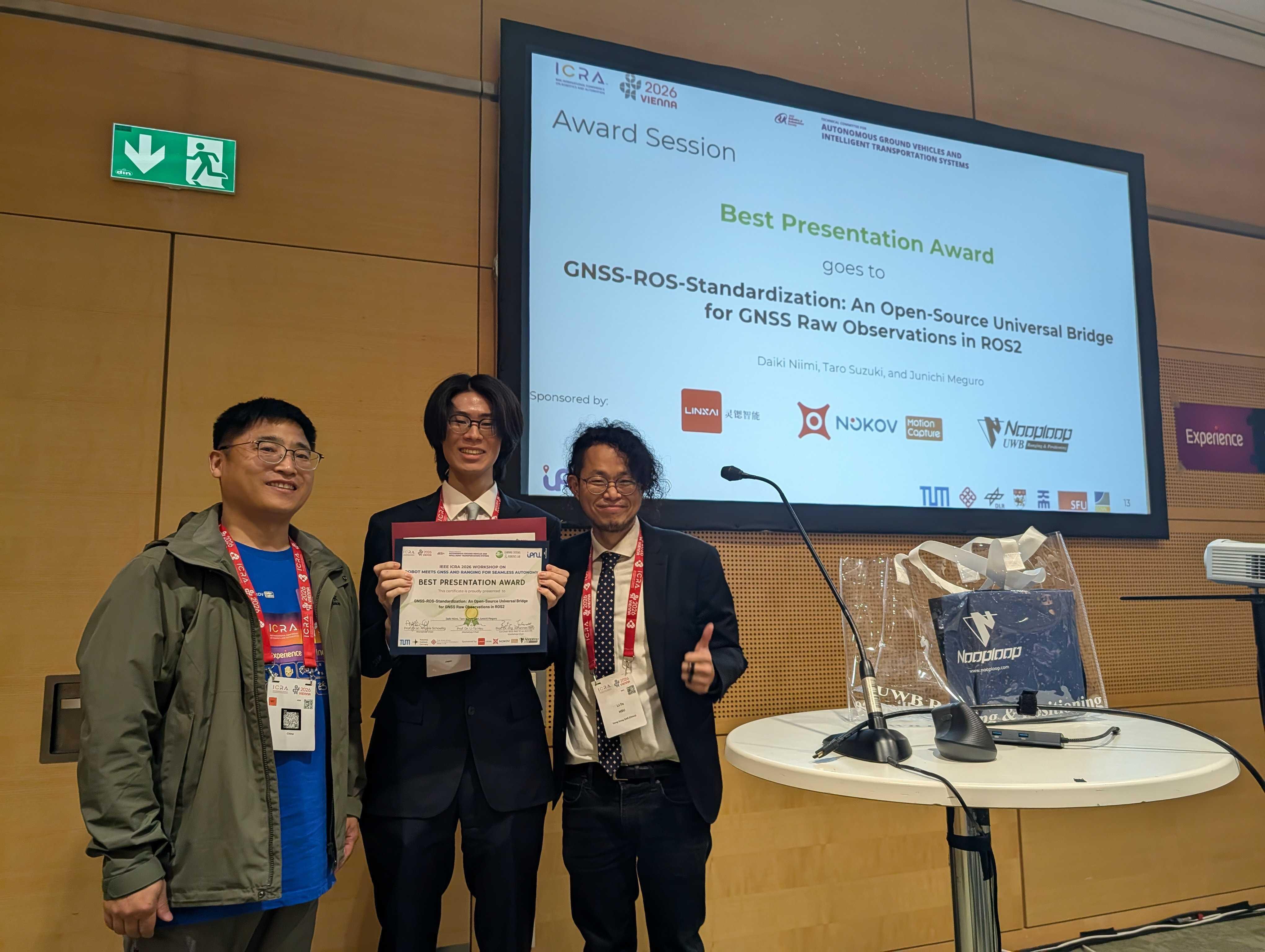 新美大樹さん(中央)
新美大樹さん(中央)
-

| 受賞者 |
新美大樹さん(理工学研究科メカトロニクス工学専攻2025年度修了、目黒研究室) |
|---|---|
| 受賞名 |
Best Presentation AWARD, ICRA 2026 Workshop, 1st Workshop on Robot Meets GNSS and Ranging for Seamless Autonomy |
| 受賞日 | 2026年6月5日 |
| 受賞テーマ |
GNSS-ROS-Standardization : An Open-Source Universal Bridge for GNSS Raw Observations in ROS 2 |
|
2026年6月5日に開催された ICRA 2026 Workshop 「1st Workshop on Robot Meets GNSS and Ranging for Seamless Autonomy」 において、メカトロニクス工学専攻の新美大樹さん(2025年度修了、現早稲田大学大学院基幹理工学研究科機械科学専攻博士後期課程在学中)、および目黒淳一准教授が Best Presentation Award を受賞しました。本賞は、ロボティクスにおける最大の国際会議であるICRA 2026に併設されたGNSS関連技術のWorkshopにおいて、優れた講演を行った研究者に対して授与されるものです。新美さんらは、「GNSS-ROS-Standardization: An Open-Source Universal Bridge for GNSS Raw Observations in ROS 2」 という題目で発表を行い、その内容が高く評価されました。 本研究では、各社のGNSS受信機の生データをROS 2上で統一的に扱えるオープンソース基盤を開発し、再現性の高いロボット測位研究の基礎を提案しました。本成果により、受信機の種類に依存しない高精度測位・マルチセンサ融合アルゴリズムの開発が加速し、自動運転をはじめとする屋外ロボットの測位技術の発展に貢献することが期待されます。 |
|